Our industry-leading, high-speed industrial robots include high-payload, extended-reach, ultra-maneuverable seven-axis and unique 15-axis dual-arm robots.
Packaging
industry_overview
Motoman Robots in the Packaging Industry
Packaging technology relies on powerful and reliable automation components. For plant operators, unplanned downtime is not acceptable – particularly at the end of the production chain. This applies to bagging and blister pack machines as well as for cartoners or any type of form, fill and seal machines. In order for such automated processes to run with precision, all of the individual components – from the controller to the robotics – must work together seamlessly. For mechanical engineers, it is easier, more effective and more cost-efficient to rely on the products and expertise of a single manufacturer.
Yaskawa has long established itself as a reliable automation partner in the world of modern packaging technology, with today’s powerful motion controllers and drive systems combined with a wide range of robot solutions designed specifically for packaging systems to enable quick and convenient machine solutions.
All over Europe and the world, we are proud of our network of experiences System Integrators, who will design and build the perfect packaging station or line for your specific needs.
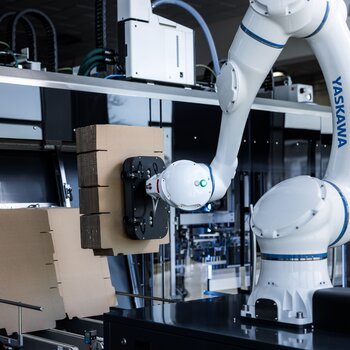
Carton Folding / Unfolding, Case Erection with Motoman Robots
For carton folding/unfolding, Robots are an attractive flexible alternative for classical folding/unfolding hardware. The robot can combine the case erection and the packing procedure, saving floor space.
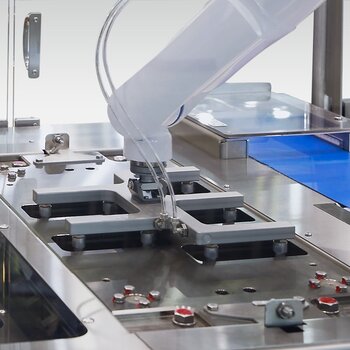
Pick, Place and Pack with Motoman Robots
Core applications in Packaging Automation are Pick and Place and Pick and Pack.
Packing Goods with Motoman Robots
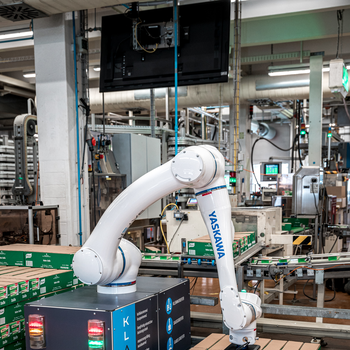
Palletizing with Motoman Robots
for more info, check the "Palletizing" application section.
Labelling
for more info, check the "Labelling" application section.
MotoSim Offline Simulation Engineering Tool
For layouting palletizing stations, we recommend to use the MotoSim Software to create a virtual twin of your workcell. Here you can arrange components into their optimum position, find out the optimum position of the robot in the middle of conveyor and belt, find the correct height of the robot stand, do reach and accessibility tests, check out stacking patterns and stacking heights, and optimize a complete workcell in terms of cycle speed and floor space requirements before you go into hardware.